
The first thing we could do is look at the height of the
toe marker.
At toe-off, the toe obviously lifts off the floor. However, as you can see, it is difficult to decide exactly when it comes off the floor. The peak toe height also occurs (obviously) quite a lot later than than toe-off. The reverse is true for initial-contact.
How about the derivative of the toe height (vertical velocity)?
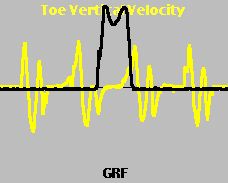
It's clear that the positive (up-going) spikes of vertical velocity approximate to the toe-off events, although there's also a second wave immediately afterwards. Heel-strike is not at all defined.
What about if we low-pass filter the data at the natural frequency, or cadence, of the gait (about 1 Hz)?
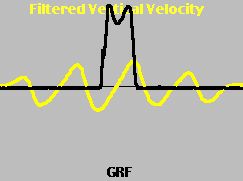
Now both the positive and negative peaks of the velocity signal nicely
define both toe-off and initial-contact.
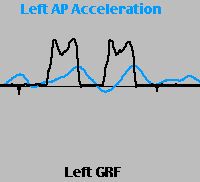
What about the AP velocity?

Clearly, this signal is of no use. However, the acceleration signal (smoothed at 6 Hz) again shows clear peaks at toe-off:
In fact, if you look at the acceleration
of the foot recorded by an accelerometer attached to the heel, you
will see that the acceration has large spikes at these two times.
Finally, for completeness, let's look at the medio-lateral direction:

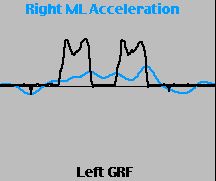
The peaks of the acceleration signal have a reasonable correlation with
contralateral toe-off, but also with foot contact.
The best kinematic indicators of TO are peak positive
vertical toe velocity (especially if it is low-pass filtered at the gait
cadence), positive vertical toe acceleration and positive AP toe
acceleration. To improve reliability, it might be best to combine these
three measures. The only indicator of IC appears to be peak negative
filtered vertical velocity.
Predicting toe off from kinematic force-time curves has one or
two subtle
problems. The phrase, "toe off," refers to the instant of final contact
between the shoe and the floor. The point of final contact between
shoe and
floor is generally the very front, bottom edge of the shoe. A marker
placed
at this position could not reach peak vertical velocity until sometime
after
toe off, when it was actually moving up.
Many biomechanists place a marker on the lateral side of the
5th
metatarsal head and not the front edge of the shoe. I examined our
data it
agrees with your statement: the instant of toe off occurs at the time
of the
peak vertical velocity of the metatarsal head. So, one subtlety is
that we
can predict the instant the toe or front edge of the shoe leaves the
floor
by examining the kinematics of another body point.
Our data do not produce a good prediction of heel contact from
the
metatarsal head kinematics. The metatarsal head is still moving forward
and
downward after heel contact as the ankle joint plantarflexes. The peak
downward velocity of the met head occurs about 20 ms after heel contact
in
our data. The second subtlety in this process is that methead kinematics
can
be used as you suggested to estimate heel contact but a fudge factor
(i.e. a
prediction equation) would be needed to adjust the predicted time of
heel
contact to an earlier value.
Thanks for your time,
Paul
Looked at your page regarding the use of toe marker kinematics as
indicators of heel contact and toe off and was surprised by your comment
in
relation to toe a/p velocity that "Clearly, this signal is of no use."
I
encountered the same problem of determining heel contact and toe off
in
amputees ambulating on a treadmill. I had some footswitch data initially
but the tests required about an hour of walking in total and the
footswitches (FSR type, from a Motion Labs EMG Footswitch system) caused
problems inside the sound shoe, often stayed in the closed position
in the
prosthetic shoe and soon wore out if I placed them on the outsole of
the
shoe. After examining the footswitch and toe marker data that I had,
I
opted for an algorithm which involved using the MPJ horizontal velocity.
The threshold for heel contact and toe off was
Vmin + 0.30(Vmax-Vmin)
and it seemed to work very well for the data I had. Just looking at
the
data on your toe-off.html page, it looks to me like it would work very
well
for your data as well.
I'm attaching a figure and caption as a word document. Hope you can read it.
Cheers,
Tim Bach.

Figure 5.3. Relationship between MPJ horizontal velocity and footswitch
data
In this trial, horizontal velocity of the MPJ marker varied between approximately 1.5 m·s-1 and -1.0 m·s-1, the speed of the treadmill. Footswitch data is shown below with larger signals indicating times of heel switch closure and smaller signals indicating times of toe switch closure. Note the variability in the footswitch signals particularly for the toe which is absent altogether for the first step. The 30% velocity threshold used to detect foot contact data is indicated by a horizontal line in the top graph. The relationship between this threshold and the timing of heel contact and toe off for a single step is indicated by the two vertical lines.
Option one would be to reduce the frequency content of my input signal
to only include frequencies below 5 Hz (digital filter), or 4-5
harmonics (Fourier), or some optimally restricted cut-off frequency
(GCVSPL available at http://isb.ri.ccf.org/software/sigproc.html).
Differentiation of the ‘smoothed' data will then allow me to reliably
identify zero-crossings or inflection points in the neighborhood of
the
‘event'. But I'm reluctant to reduce the frequency content
of my
signal to the point where I can reliably find ‘events' since I also
require high-accuracy estimates of the ‘event' times to calculate
high-accuracy estimates of the cycle-times (I will fit a curve using
GCVSPL at the located ‘event' frame, then interpolate frames to find
the
exact time at which a zero-crossing or inflection point occurs).
Option two could use a user-defined ‘worm', centered at an event, to
find similar later occurring events by minimizing RMS difference.
Stanhope et al. (Stanhope SJ, Kepple TM, McGuire DA, Roman NL.
Kinematic-based technique for event time determination during gait.
Med
Biol Eng Comput 1990 Jul;28(4):355-60) published a paper using this
method and they recommend the use of a sagittal plane, 5-7 frame ‘worm'
to identify gait events. However, to improve ‘event' location
accuracy
they digitally filtered their data thereby potentially altering
frequency content and subsequently true ‘event' time. [I should note
that I have tried this method and get about 30% false-positives and
25%
false-negative return rates].
Option three could use fuzzy system identification to identify gait
events. This technique was used by Ng and Chizeck (Ng SK, Chizeck
HJ.
Fuzzy model identification for classification of gait events in
paraplegics IEEE Trans on Fuzzy Systems 1997 5(4): 536-544).
Although
this process could use raw data, they filtered at 5 Hz, altering
frequency content. Even so, it seems that the technique was able
to
only correctly identify 80% of ‘events', a value unacceptable for my
application. [Although I must note that this method is implementation
attractive since MATLAB has built in callable-functions. Maybe
someone
knows how to improve accuracy?].
Option four could use cluster analysis (Kaufman L, Rousseeuw PJ.
Finding groups in data: An introduction to cluster analysis,
John Wiley
& Sons, Inc., 1990) but to my knowledge this has not been attempted
to
locate gait events and I'm reluctant to follow a path that may be
fruitless.
So, in conclusion I seek help from the Biomechanics community.
Ideally,
someone out there has the perfect source code (I still program in
Fortran!) that I could embed within my application. As usual
practice,
I will post a summary of the responses to my query.
Thanks,
Michael Pierrynowski
McMaster University
Canada
Usually, in identfying the gait cycle events using Vicon motion
analysis, I identify the 'toe off' event with the point at which the
foot begins to
move forward i.e. the start of swing. An alternative would be to identify
the
point at which the foot leaves the ground i.e. when there is clearance
(which is what 'toe off' literally means). We have recently analysed
the
gait of a little girl with marked foot drag . In her case, the latter
definition results in a 30% shorter 'swing phase' compared with the
former definition. Which definition of 'toe off' event is correct?
Or do labs
have specific protocols for different presentations?
Please advise.
Dominic Lloyd-Lucas
Clinical Scientist
Sheffield Teaching Hospitals
UK
email: dominic.lloyd-lucas@sth.nhs.uk
My thoughts are that this dilemma is due to the terminology used. Foot-
off defines the point where the foot comes 'off' the ground, however
in
this case foot-off does not correspond with the point where foot
progression begins. It may be necessary to describe the cycle in terms
of both stance and swing phases (defined by the foot-off and foot-
contact events) as well as foot-stationary and foot-progression phases
(defined by the points at which foot progression begins and ceases).
It will be interesting to hear others' views on this topic.
Regards,
Pete Mills
It is the function of the leg that matters. Let's assume that we accept
that
the conventional tasks during the gait cycle are weight acceptance,
single
support and double support for the stance phase and limb advancement
for the
swing phase.
If someone drags the foot then its main function at that moment is not
propulsion any more (as it was at the end of the stance phase) but
progression. In that sense this should be named the swing phase.
Obviously it's more convenient to look for the point in time when the
size
of the force vector drops to zero but it probably does not relate to
the
function of the leg.
Gabor
--
Dr Gabor Barton (MD)
Senior Lecturer in Biomechanics
Centre for Sport & Exercise Sciences, Liverpool John Moores University
Room 2.51 Henry Cotton Campus, 15-21 Webster Street, Liverpool, L3
2ET
Tel: +44 (0)151 231 4333/4321 Fax: +44 (0)151 231 4353
E-mail: G.J.Barton@livjm.ac.uk