SY20: Modeling techniques in gait
analysisSY20: Modeling techniques in gait
analysis
SY20: Modeling techniques in gait
analysisSY20: Modeling techniques in gait
analysis| Question | Variable | Posibilities | Modeling Tool | Assumptions & Limitations | Applications |
| Range of Motion, restricted motion, excessive motion | Joint Angles, Velocities | 2D/3D, Helen Hayes, Cleveland, 6DoF joints | Link-segment model | Euler sequence dependence & gimbal lock | Pre/Post Assessment, documentation, outcome measures |
| Spasticity | Muscle-tendon lengths | Maximum & minimum averaged length | Deformable model, 3D reconstruction ± radiographic, MRI images | Muscle origin & insertion anthropometry, skin-bone artifact, muscle physiology | Planning treatment (e.g. surgery in Cerebral palsy) |
| Direction & magnitude of muscle activity | Joint Moment
Electromyography |
Flexor/extensor
Ab/adductor In/external rotator |
Inverse Dynamics (needs force platform)
Mp = I.a - Md + Rxp(yp - yCoM) + Ryp(xCoM - xp) + Rxd(yd - yCoM) + Ryd(xCoM - xd) where p=proximal; d=distal; CoM = center of mass; a = angular acceleration |
Errors in joint center estimation, body segment parameters, error propagation | Identify weakness/spasticity, prosthetic alignment |
| Joint loading | Joint Force | Magnitude
Direction |
Inverse Dynamics
Optimization |
Lever arms, force compartmentalization | Endoprosthesis design, arthritis/walking aid assessment |
| Type of Contraction | Joint Power | Concentric
Eccentric |
Inverse Dynamics
P = Mw where w = angular velocity |
Filtering greatly affects peak amplitudes | Determine purpose of muscle activity (propulsion or braking) |
| Energy Transfer | Segmental Energies | Potential
Linear kinetic Rotational kinetic |
Segmental equations of motion | Body segment parameters | Prosthetics |
| Energy Consumption | Oxygen consumption, Physiological Cost (PCI) | Energy consumed (metabolic cost)
Change in Heart Rate from resting |
VO2 | Encumbrance of subject
Confounding variables (anxiety) |
Evaluation of Interventions (e.g. prostheticorthotic devices, surgery) |
| Efficiency | Joint Energies | Generation
Absorption |
Integration of Joint Powers | No co-contraction, friction, energy storage | Efficiency of prosthetic components |
| Direction of effort | Power Flow | Proximal
Distal Absorbed |
Passive & Active contributions to segmental power | Foot segment can be difficult to balance | Determining the role of muscle power bursts |
| Destination of effort, source of motion | Induced Acceleration | Ipsilateral joint
Contralateral joint |
Coupled Dynamics
a = M-1(q)t - M-1C(q,w) - M-1G(q) |
Singularities due to problems in defining foot-floor interaction | Determine source of a given moment & control strategies available |
| Balance Control | Center of Pressure, Center of Mass, Base of Support | Postural Sway, anticipatory & reactive torques | Inverted Pendulum, Full body models, perturbation studies | Interpretation during locomotion | Falls in the Elderly, Quantification of Dysequilibrium |
| What if...? | Dynamic (Forward) Simulation | Computed Joint Motion Trajectories | Lagrange, Kane | Initial conditions, often 2D, assume trajectories | Influences on swing phase knee flexion. |
| Paraplegic Locomotion | Finite States Machines |
Functional Electrical Stimulation (FES), conventional orthoses, hybrids |
Rule base control, confusion matrices, accelerometers, force sensors, fuzzy logic, machine learning, neural networks | False positives & negative event detection | Neuroprostheses |
| Walking machines
"I never satisfy myself unless I can make a mechanical model of a thing. If I can make a mechanical model I can understand it." (Lord Kelvin) |
Balance, forward motion, energy consumption | Passive Walking, reflexes, springlike properties of muscles, tendons | Inverted Pendulum, series-elastic actuators, limit cycles, micro- gravity | Falling, instability | Test understanding, control hypotheses. |
|
|
|
|
| Joint Angle |
 |
Approx. neutral at contact
Dorsiflexes through stance Sudden plantarflexion at toe-off Rapid return to neutral |
| Joint Angular Velocity |
 |
High plantarflexor velocity at toe-off |
| Center of Pressure | ||
| Joint Moment |
 |
Small dorsiflexor moment on contact
Rise in plantarflexor moment to a maximum in late stance |
| Foot Power | ||
| Shank Power | ||
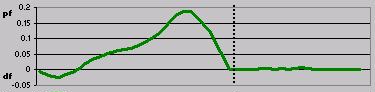
| Joint Power |
 |
Small eccentric after contact
Large burst of concentric power in late stance ("push-off") |
| Power Flow | ||
| Soleus Induced Acceleration | ||
| Gastroc Induced Acceleration |